rapyuta.io platform now supports ROS Noetic – the 13th ROS distribution, exclusively targeted for Python3. ROS Noetic is primarily targeted for the Ubuntu Focal 20.04 release.
Working with ROS Noetic on rapyuta.io
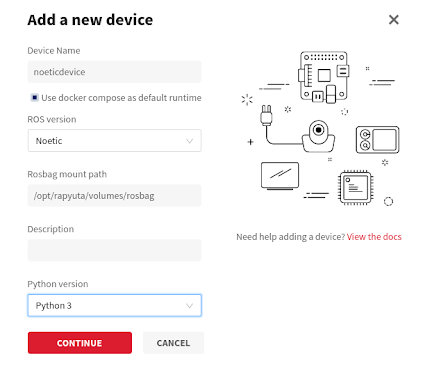
Onboarding a Device
To onboard a device:
- On the left navigation bar, select Devices -> All Devices.
- Select ADD NEW DEVICE, enter the Device Name, and select Noetic from the ROS version dropdown menu.
For more information on onboarding a device, see Onboarding a Device.
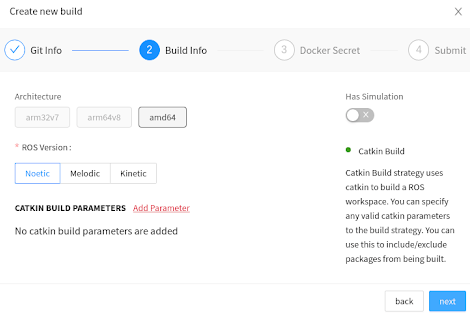
Creating Builds
To create catkin builds for ROS Noetic:
- On the left navigation bar, select Development -> Builds.
- Select ADD NEW BUILD.
- In the Create new build dialog, enter the Name, Repository, and select Catkin as the build recipe. Click next.
- Select Noetic as the ROS version.
For more information on creating builds, see Creating a Build.
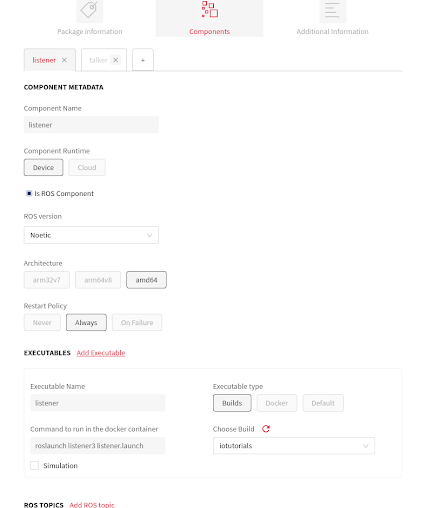
Creating Packages
To create packages targeted for noetic deployments on the device or cloud:
- On the left navigation bar, select Development -> Catalog.
- Select ADD NEW PACKAGE, and enter the Package Name. Click next.
- Enter the Component Name, select the Component Runtime, and select Noetic from the ROS version dropdown menu.
For more information on creating packages, see Creating Packages.
For further queries or support, please write to info@rapyuta-robotics.com.



