We extensively use Open Source Software in our work to accelerate innovation and delivery. We are also committed to contributing back and creating new projects.
Past Presentations on OSS Conferences
ROSCon 2022, Kyoto
Talk about our ROS 2 distributed simulator for Unreal Engine, an open source game engine. Combining UE’s multiplayer game features with rclUE, a distributed simulation environment for ROS 2.
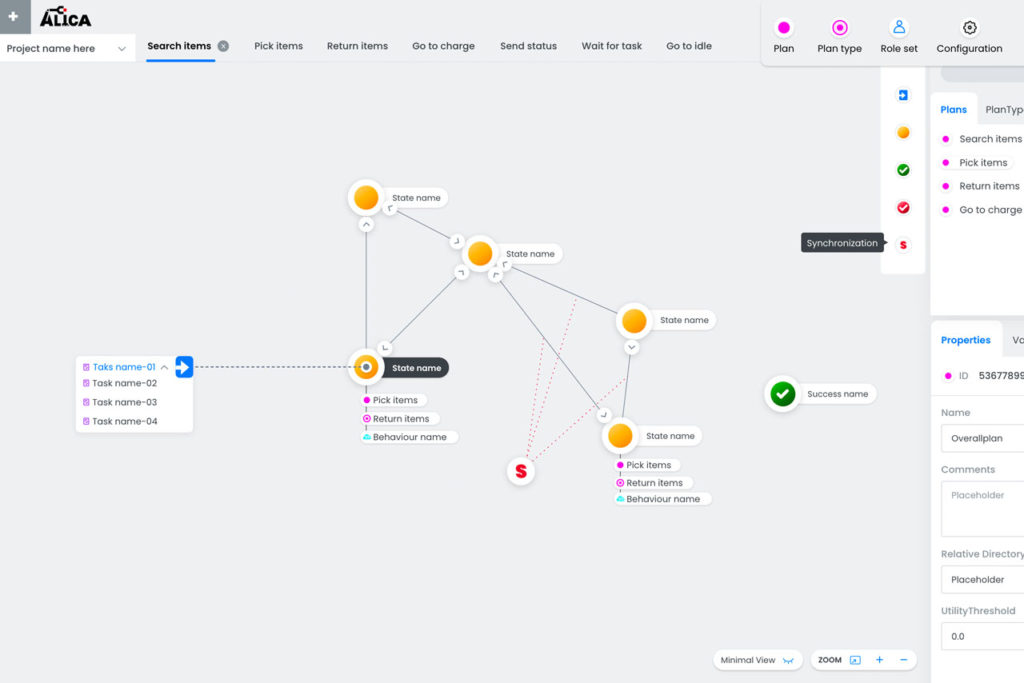
ROS World 2021 ALICA
How to graphically model multi-agent behaviors and live debug those behaviors independent from the location of the deployed agents. This is demonstrated with a warehouse automation use case, including multiple forklifts and an AGVs.
ROSCon 2019, Macau
ROS in the Jupyter Notebook in collaboration with Quanstack, France.
KubeCon 2018, Copenhagen
Building a Platform-as-a-Service for Robotics with Kubernetes.
ROSCon 2017, Vancouver
How to accelerate application development using a Cloud Robotics platform.
RosCon 2013 Understanding the RoboEarth Cloud
Gajan Mohanarajah talks about the RoboEarth Cloud.
Our Open Source Leadership
ALICA
The ALICA Framework (A Language for Interactive Cooperative Agents) is an open source multi-agent coordination framework that originates from the highly dynamic domain of robotic soccer.
ROS2 Client Library for UE
rclUE is a tool that enables cloud robotics simulation in Unreal Engine. rclUE bridges UE4 and ROS2, opening UE4’s tools to ROS developers through a C++ interface. Furthermore non-ROS engineers will be able to quickly set up robot simulations through UE4’s blueprint visual scripting language by using the instruments that ROS developers and the plugin exposed.
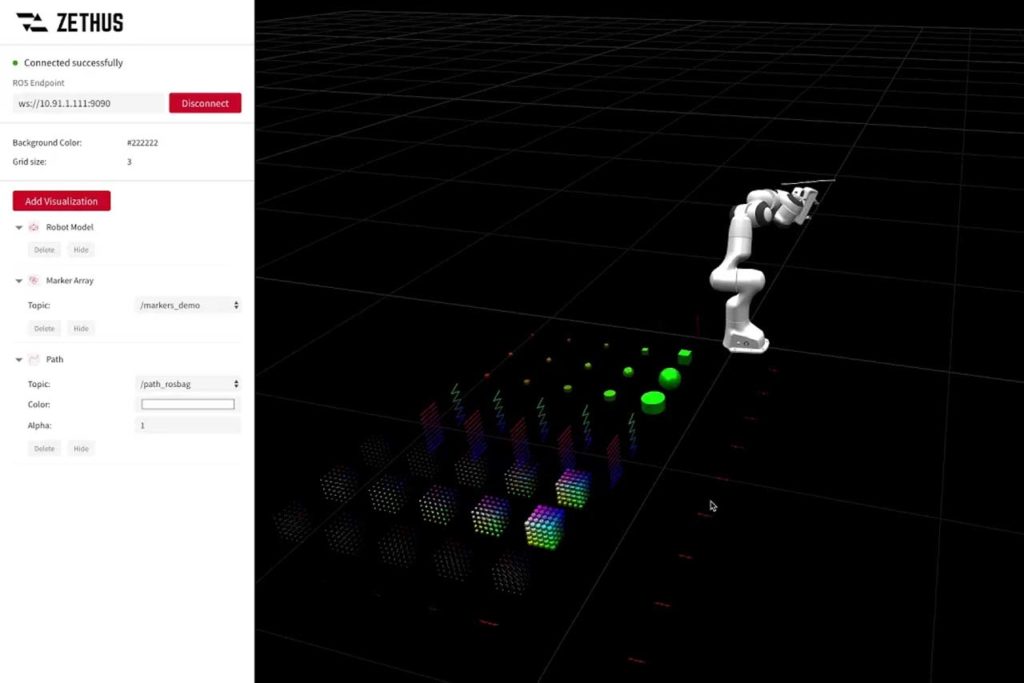
Amphion and Zethus
Amphion and Zethus are two JavaScript libraries to visualize ROS data from remote WebSocket endpoints in the browser. Zethus is the browser equivalent of RViz, built on top of Amphion. Amphion can be seen as an alternative to ros3djs with enhancements to design and performance.
ROSCon Sponsorships
ROSCon is the largest annual gathering for the community using and developing the open-source ROS – Robot Operating System. We support and stand behind the mission to bring together the diverse and global community of ROS developers.