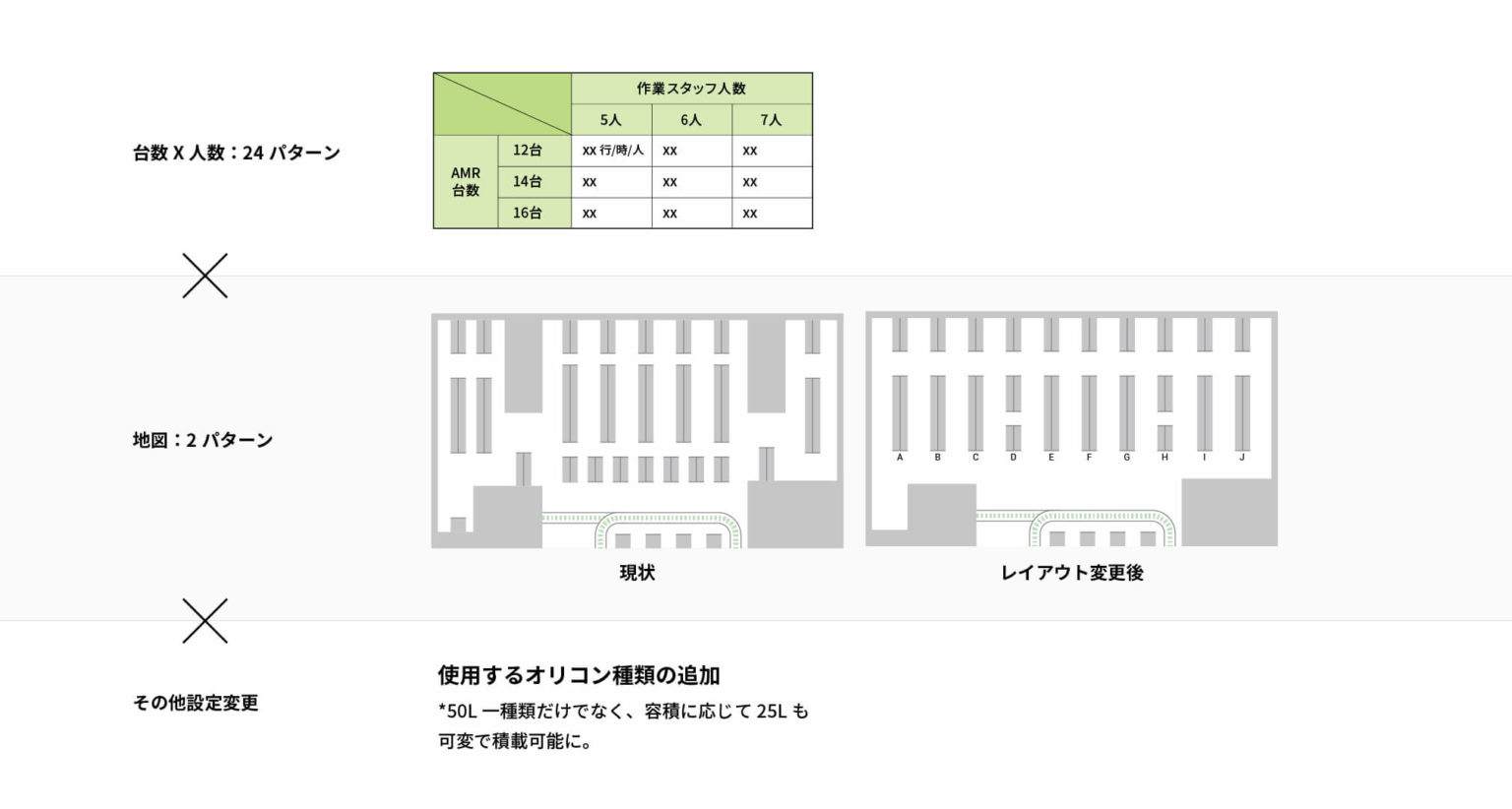


取り扱う荷物のサイズやオーダーの分量に応じてコンテナサイズ(最大60 L)を変更可能
| 10Lのコンテナ4個搭載 | 60リットルのコンテナ2個搭載 |
|---|---|
| 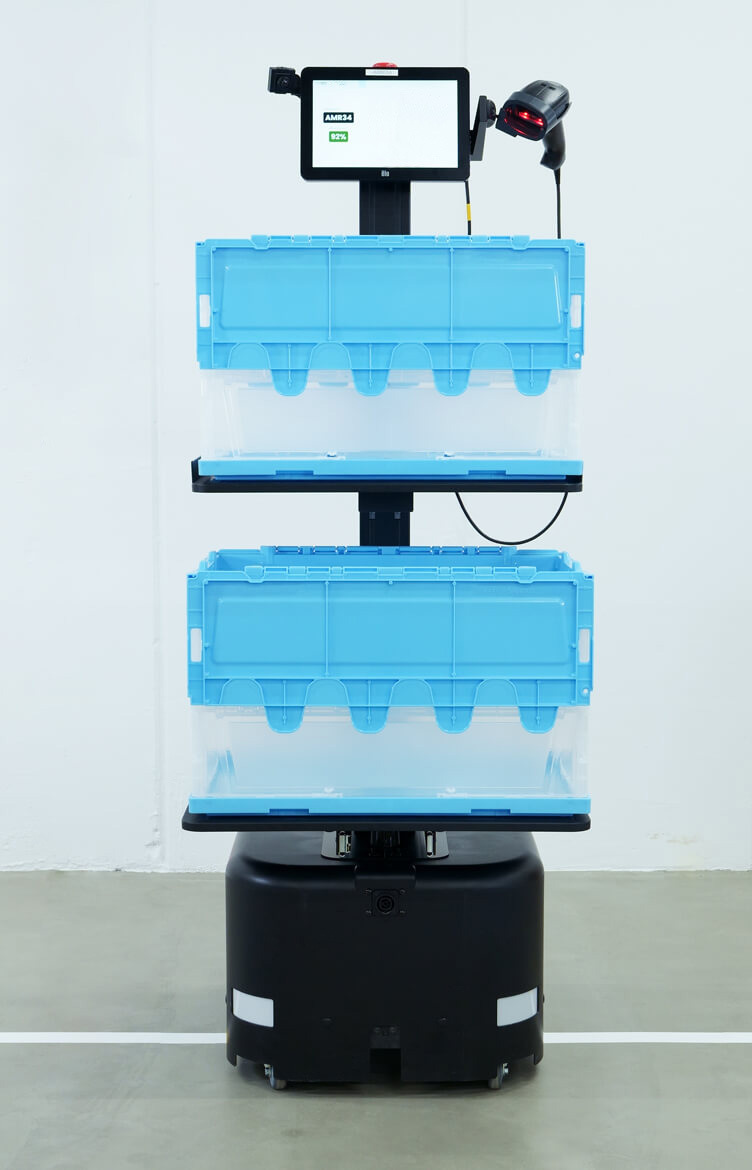 |
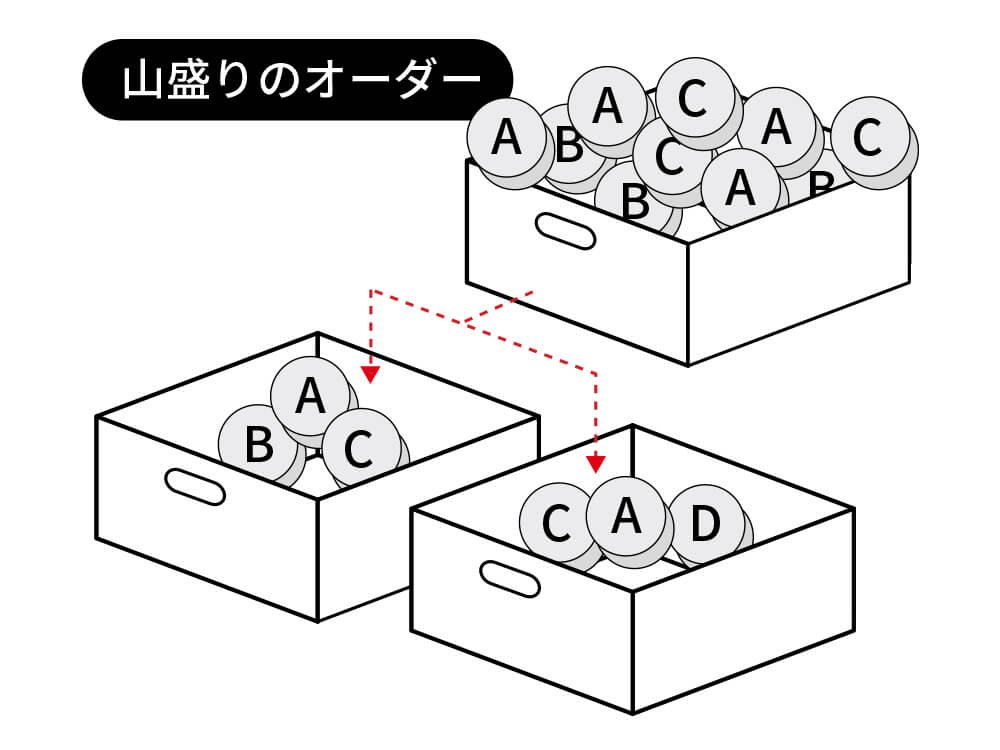
| 4オーダー分のマルチオーダーピッキングに対応 | 2オーダー分のマルチオーダーピッキング、またはトータルピッキングに対応 |
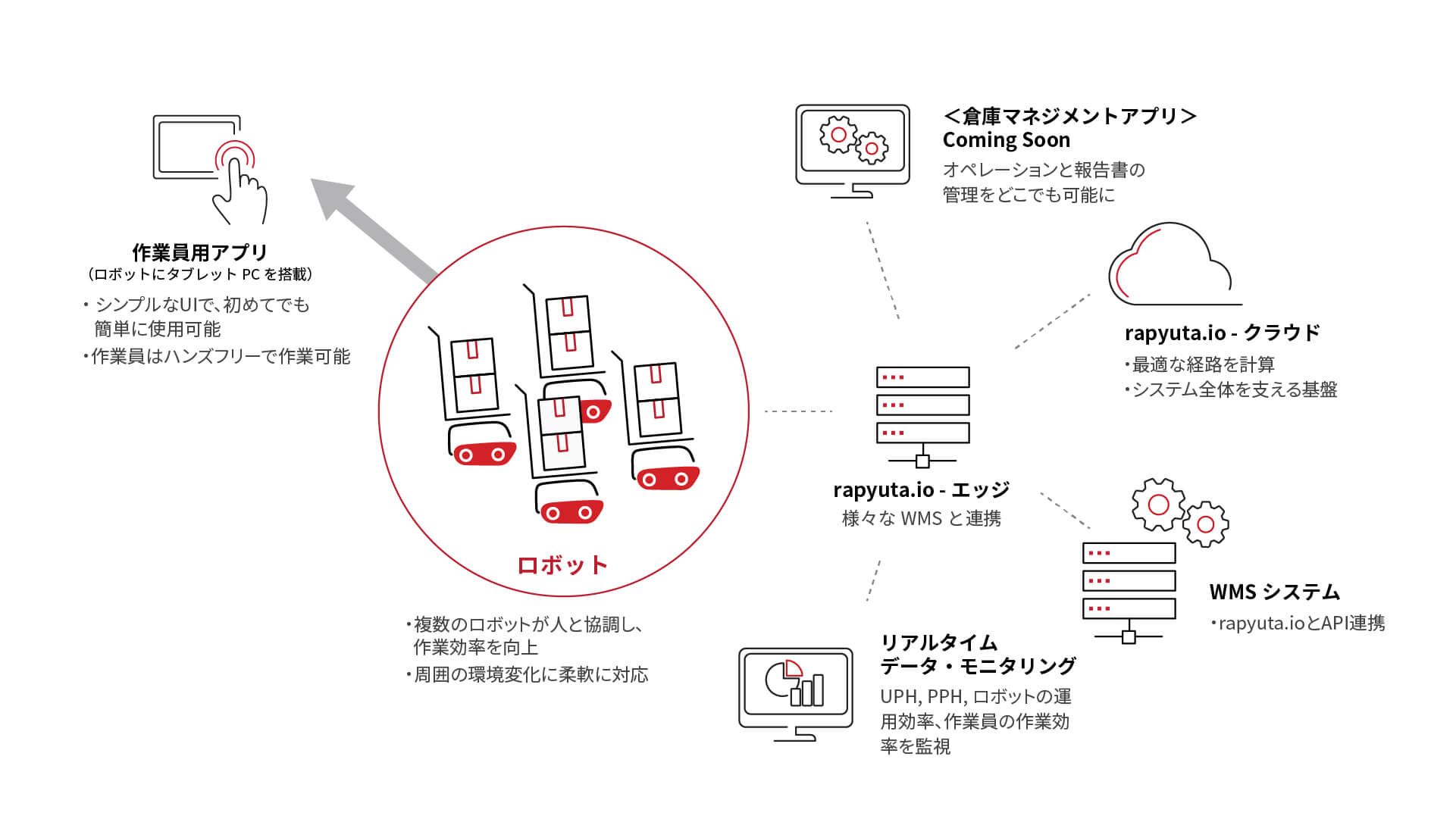
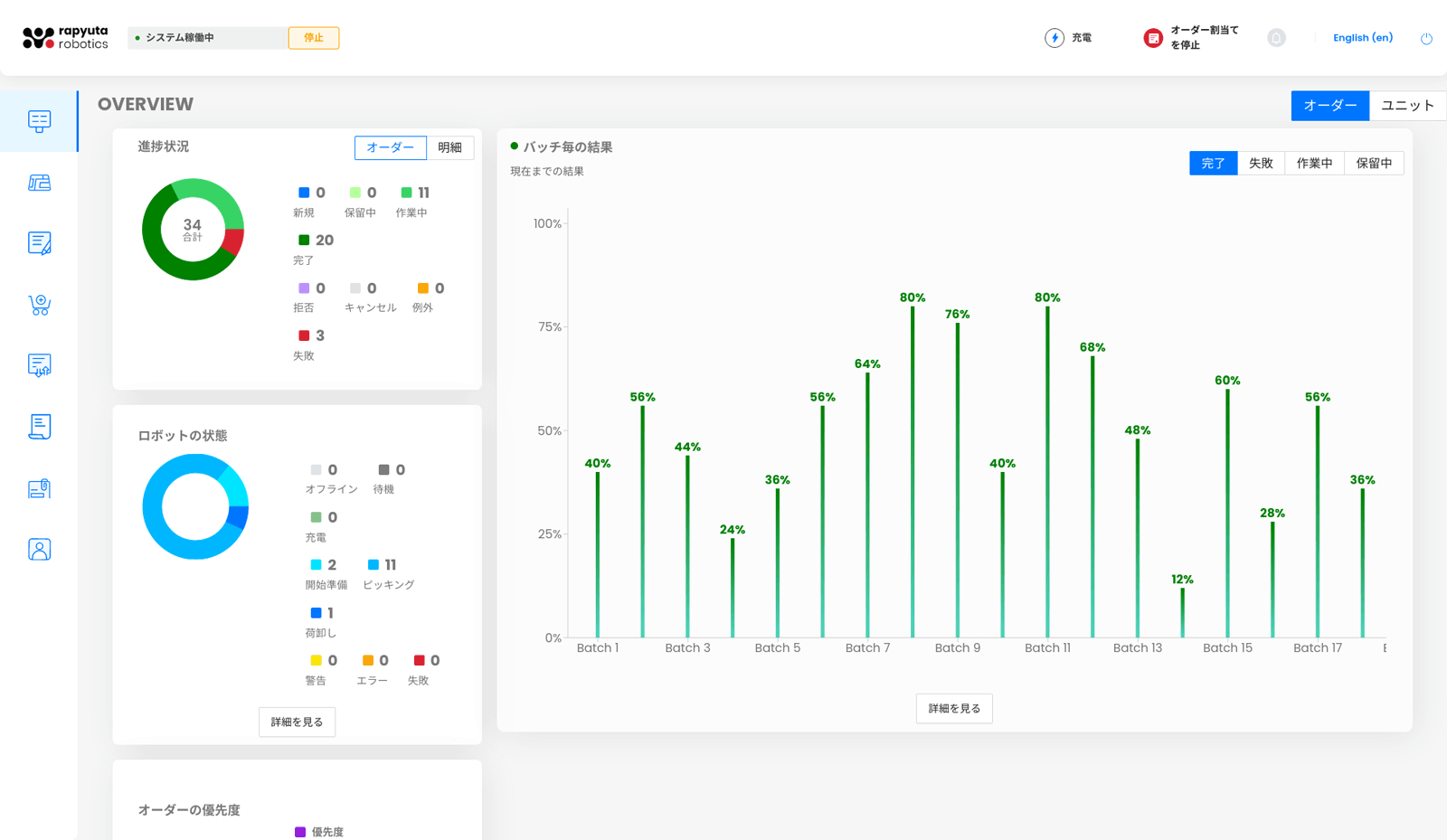
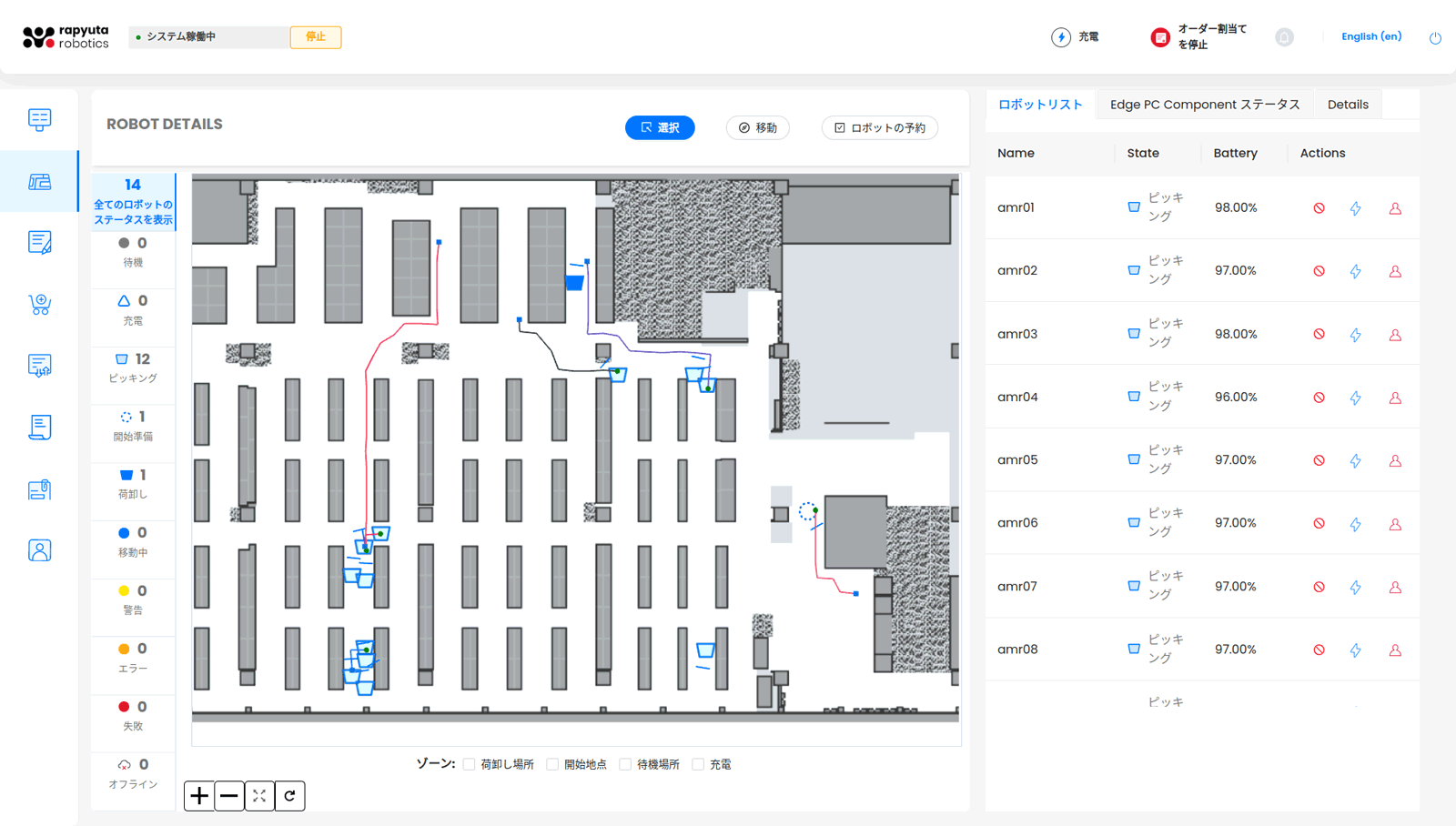
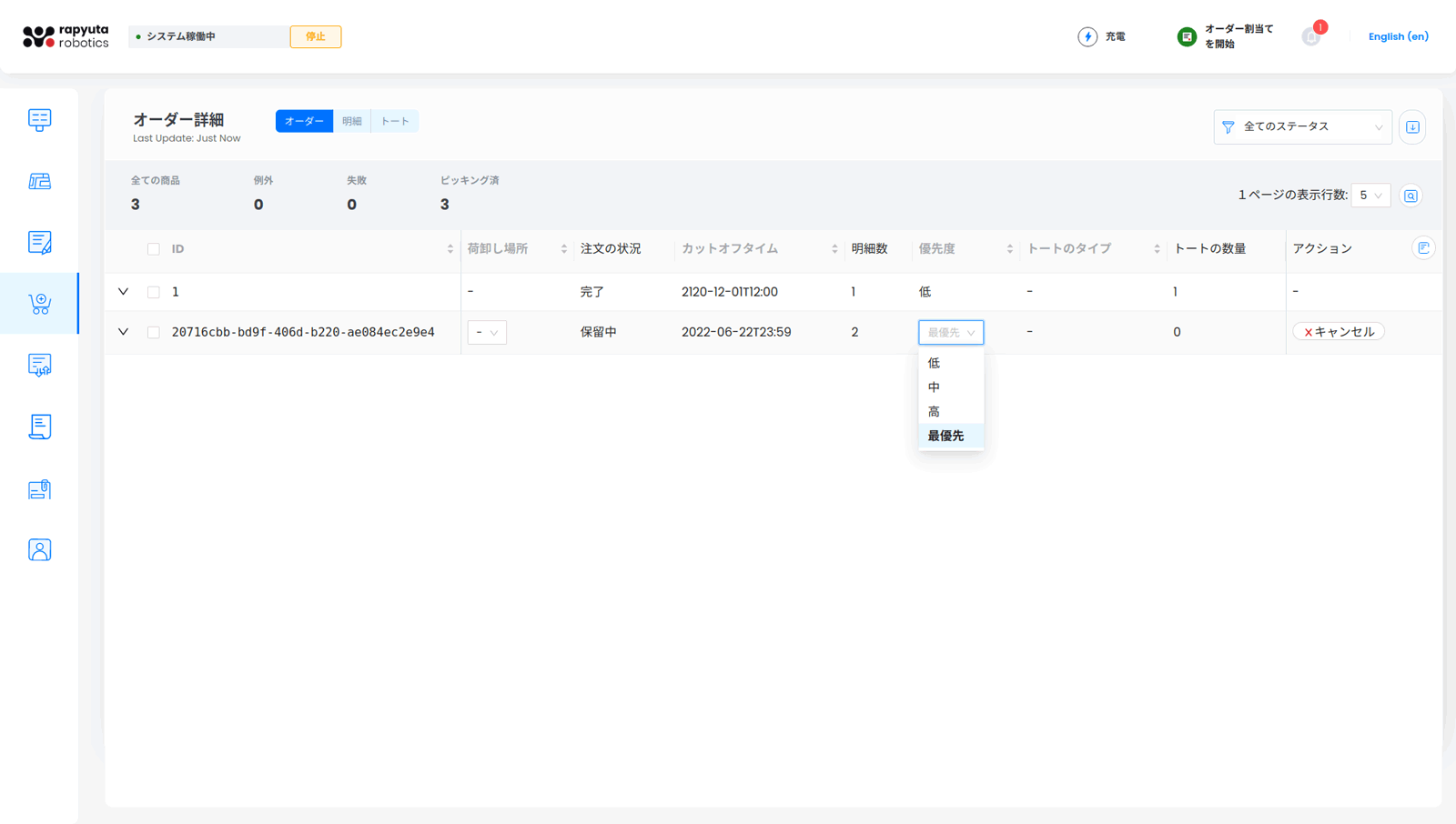
ピッキング作業の進捗状況の把握、ラピュタPA-AMRの機体情報、全AMRの位置情報、オーダーの詳細情報などを一元管理(リモートアクセスも可)
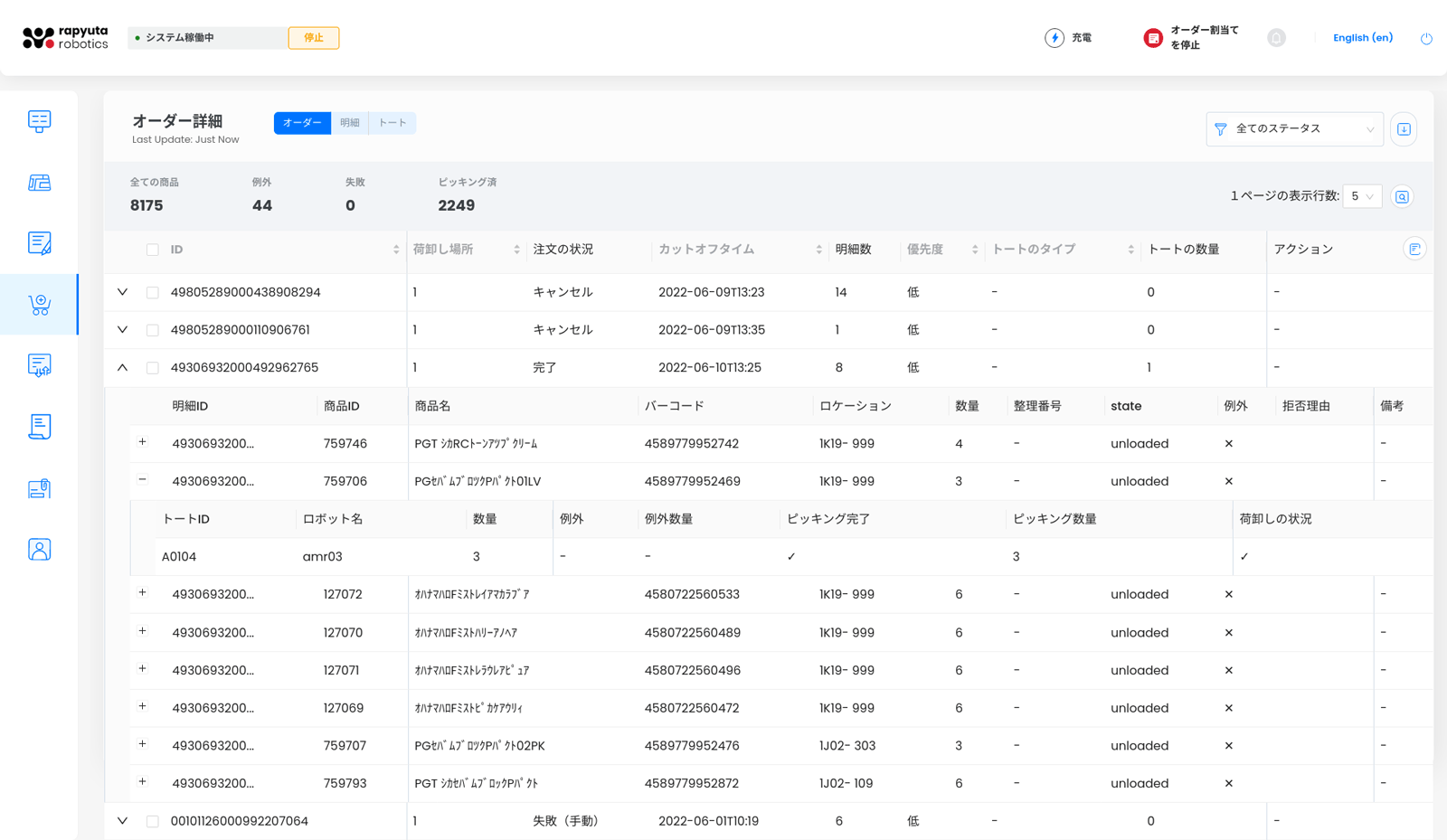
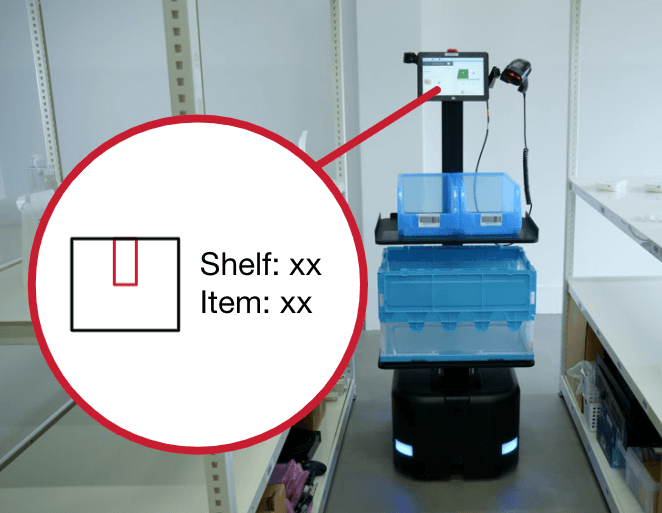
AMRに搭載されている、タブレットにスタッフが次に向かうべき場所が表示されます。
注:本機能を使わず、ゾーンピッキングを行うことももちろん可能です。

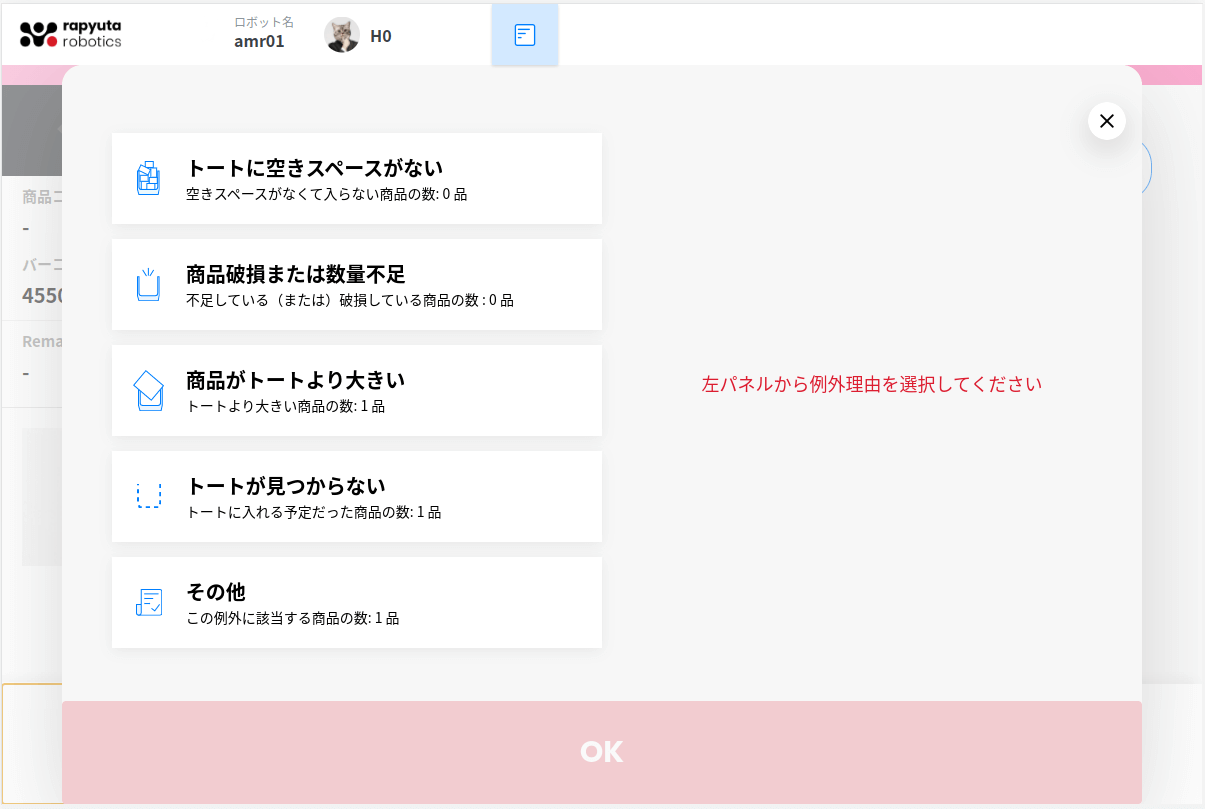
ピッキング作業をしていると、商品が欠品していたり、破損していたりと様々なアクシデントが発生します。
ラピュタPA-AMRではエラー対応のフローも、実務を通じて作り込まれており、適切な入力が可能です。また、荷降ろし場では、エラーがあったコンテナには警告が表示され、欠品した商品以外を後工程に流すのか、一度オーダーをすべてキャンセルするのか等現場の方針やその時の状況に応じた対応出来ます。

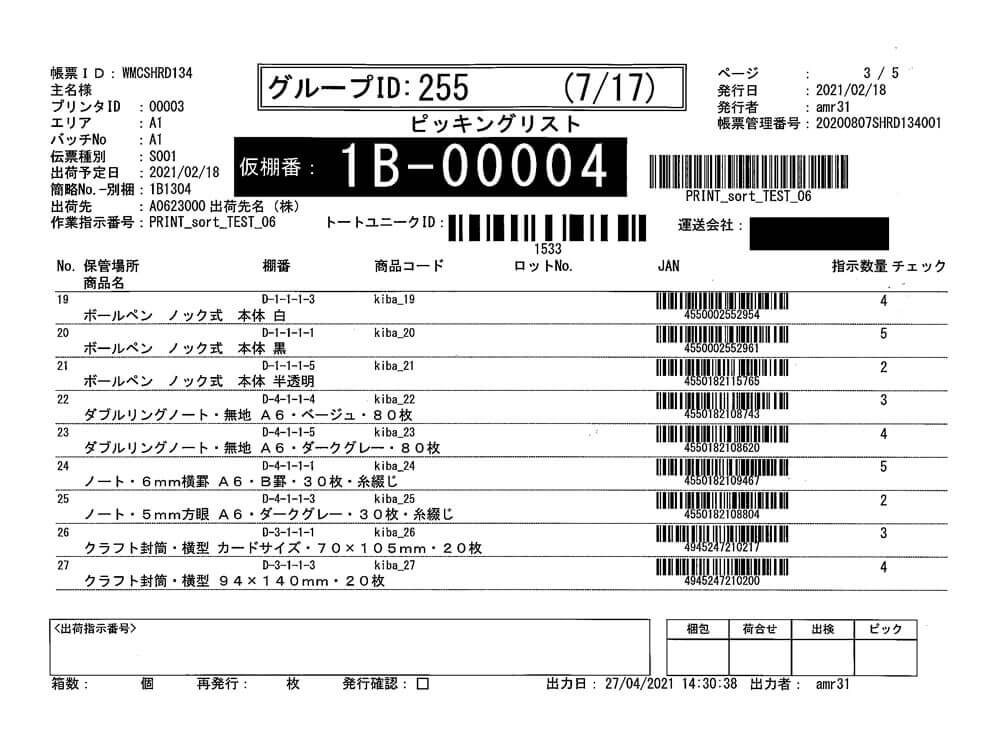
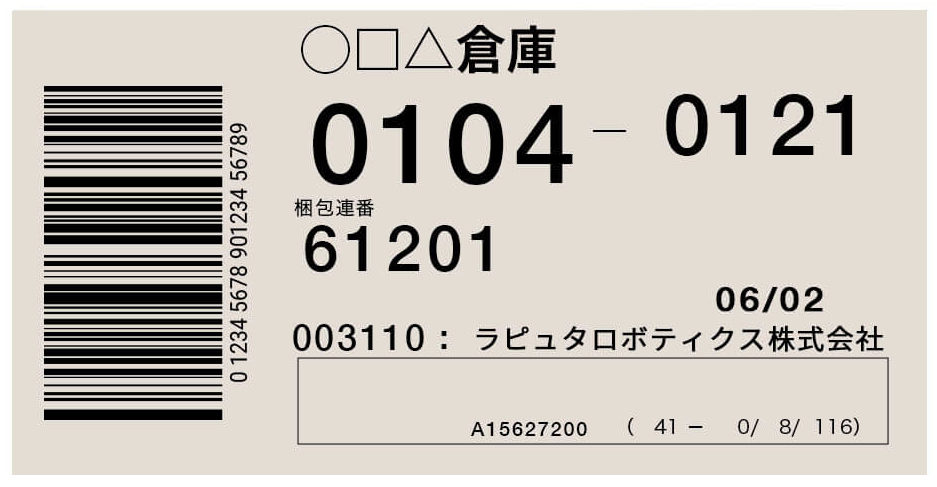
ピッキング後の検品用に帳票を出力したり、出荷先からの要望に合わせて出荷ラベルを印刷する等のカスタマイズが可能
荷主や出荷先からの個別リクエストに柔軟に対応
物量が一時的に増加する繁忙期等の波動対応としてマニュアルピッキングとAMRを用いたピッキングを並走させることが可能です。



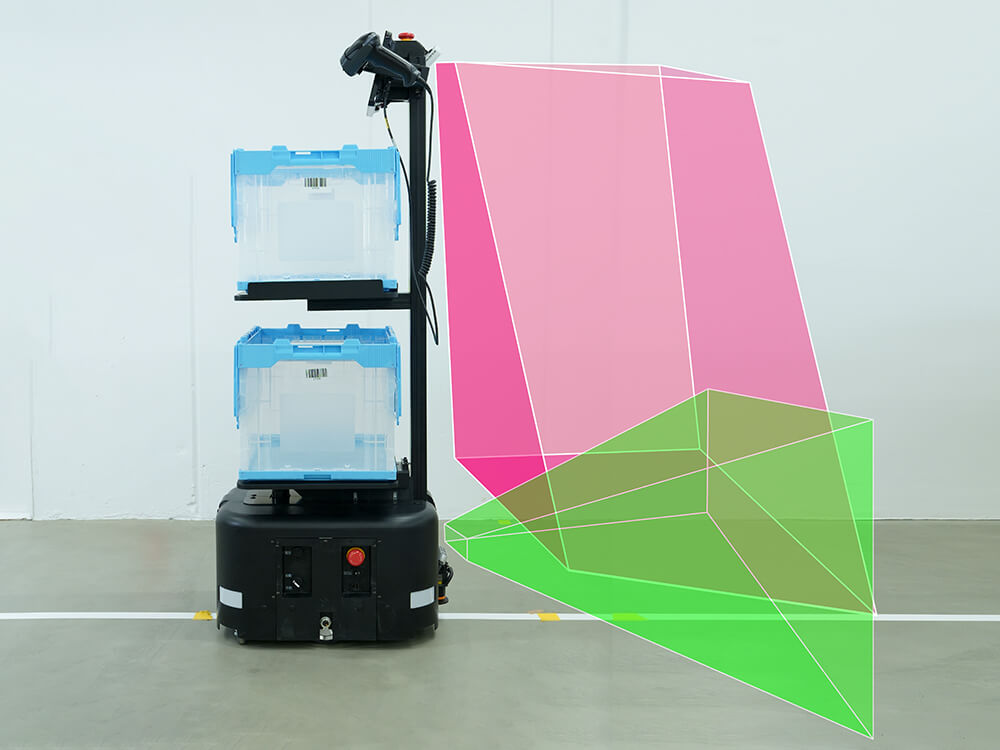
人と協働するAMRに何よりも大切なのは安全性です。ラピュタPA-AMRには、下記のセンサーと緊急停止スイッチが搭載され全方位的な安全を担保しています。
緊急出荷が必要なオーダーに対応する際などに活用。優先順位が高いものからピッキングを行うように、AMRに割当が行われます。

画面
バーコードリーダー
E-Stop
E-Stop
4 x LEDライト
開閉式トレイ(特許出願済み)
上段トレー