私たちは、イノベーションとデリバリーを加速させるために、オープンソースソフトウェアを広く活用しています。また、常に変化を反映させ、新しいプロジェクトを立ち上げることに貢献します。
Unreal Engineを用いたROS 2分散シミュレータの構築方法についてROSConにて発表しました。オープンソースのゲームエンジンであるUEのマルチプレイヤー機能をrclUEと組み合わせることで、ROS2対応の分散シミュレータを構築しました。
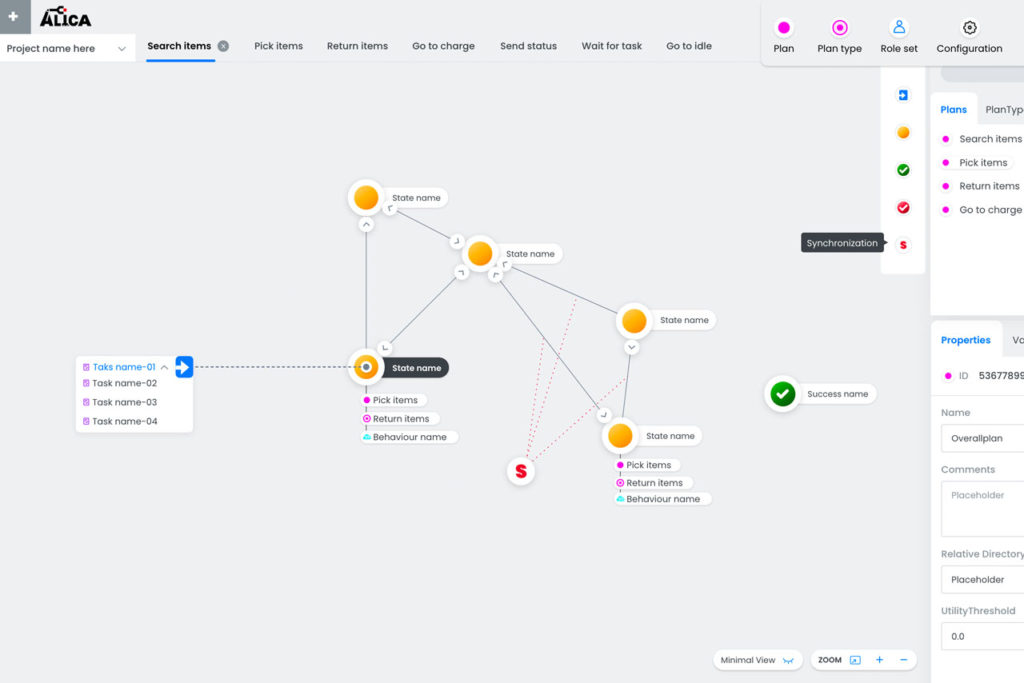
マルチエージェントの動作をグラフィカルにモデル化し、配置されたエージェントの場所に依存しない動作をリアルタイムで検証する方法です。すでに、複数のフォークリフトとAGVを含む倉庫の自動化のユースケースにおいて実証されています。
フランスQuanstack社と共同で、Jupyter NotebookにROSを実装しました。
ロボティクス向けPaas (Platform-as-a-Service) をKubernetesを用いて構築しました。
クラウドロボティクスプラットフォームを利用した迅速なアプリケーション開発の方法。
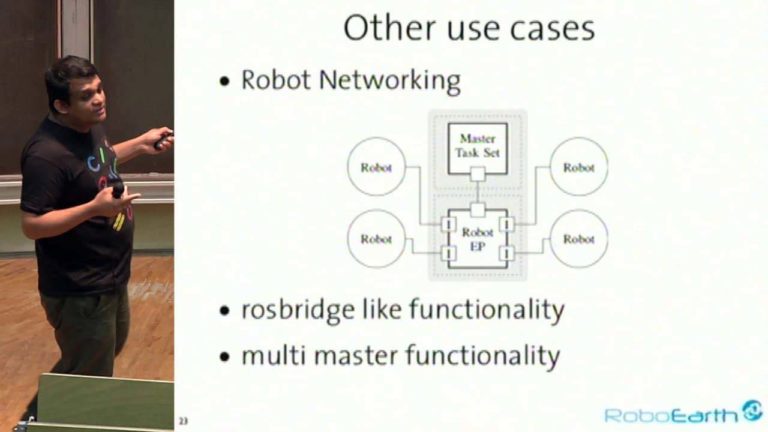
代表取締役CEOモーハナラージャ・ガジャンが「ロボアース・クラウド」について講演しました。
ALICAフレームワーク (A Language for Interactive Cooperative Agents) は、ロボットサッカーという非常にダイナミックな領域から生まれた、オープンソースのマルチエージェント協調フレームワークである。
rclUEは、Unreal Engineでクラウドロボティクスシミュレーションを可能にするツールです。rclUEはUE4とROS2の架け橋となり、C++インターフェースを通じてUE4のツールをROS開発者に開放します。さらに非ROSエンジニアは、ROS開発者とプラグインが公開した機器を使用することで、UE4のブループリント・ビジュアルスクリプト言語を通じてロボットシミュレーションを迅速にセットアップすることができるようになるのです。
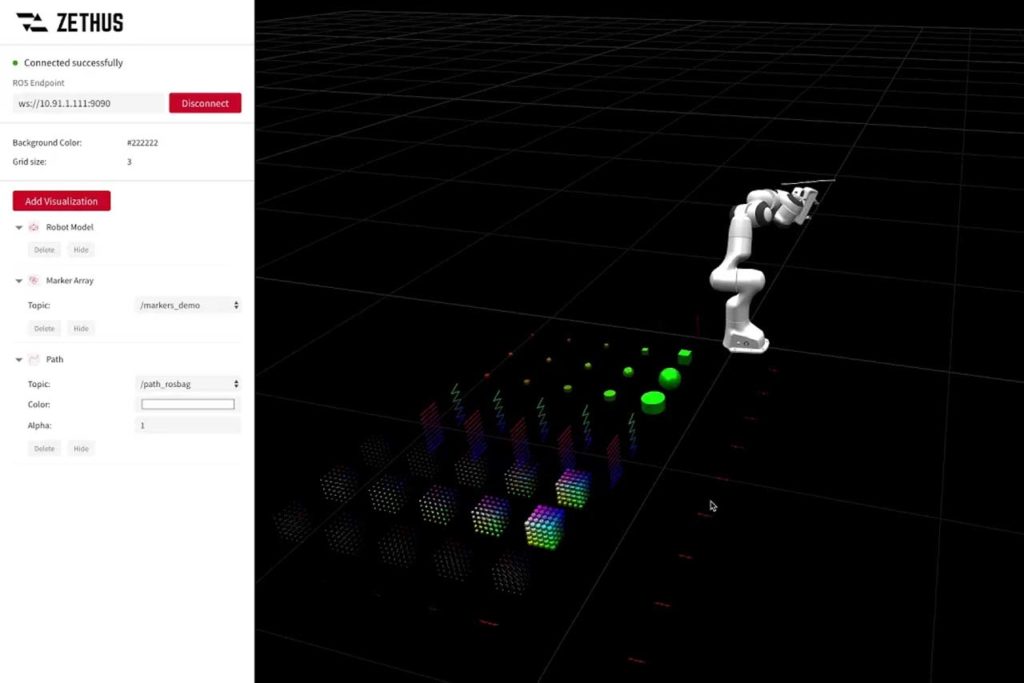
AmphionとZethusは、ブラウザでリモートWebSocketエンドポイントからROSデータを可視化するための2つのJavaScriptライブラリです。Zethusは、Amphionの上に構築されたRVizのブラウザ版です。Amphionは、デザインとパフォーマンスが改良されたros3djsの代替品とみなされます。
ROSConは、オープンソースのROS (Robot Operating System) を使用・開発するコミュニティにとって、毎年開催される最大のイベントです。私たちは、ROS開発者の多様でグローバルなコミュニティを結集させるというミッションに賛同し、支援しています。
ROSCon 2017 – ゴールドROSCon JP 2019 – ゴールドROS World 2020 – ゴールドROS World 2021 – プラチナROSCon 2022 – ゴールド